OBC: On Board Computer
On Board Computer (OBC)
Presentation
The On Board Computer, or OBC, is the brain of the satellite and has different missions such as the coordination of all the actions, sending orders to the different modules, the reception and storage of information of the CubeSat, sending this information back to Earth via the TCS error handling within the CubeSat.
Subsystem division
The OBC is divided into three subsystems which are Microcontroller, Interfaces and Electronics.
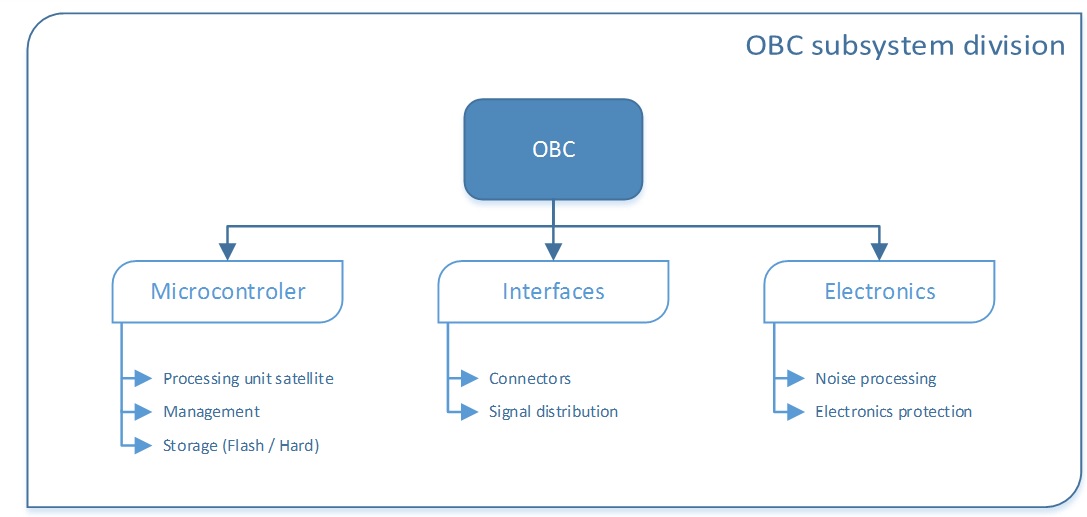
The Microcontroller is a processing unit of the OBC dedicated to the Satellite Management (SM). Its has to manage the data from other modules collected through the interface and to use it to give orders.
The interface subsystem is responsible for the communication with other modules. It ensures a good connection with other systems of the satellite and allows them to send information. It is also in charge of collecting the power supplied by the EPS. The microcontroller is in charge of the storing system data, operation data, logs and measurements.
The electronics subsystem protects all the electronic components of the OBC chip from radiation and magnetic fields. It also prevents destructive noise on the signals processed within the OBC.
State Of The Art OBC
The goal of the state of the art is to establish an inventory of the existing technologies and to see their underlying potential of their utilization in the project. .
Compostion of the OBC
OBC is the brain of the CubeSat. It is based on a microcontroller connected to the subsystems via a serial data bus and HW device. A real time OS (RTOS) that manages all the software applications, starts the microcontroller and provides the flight software CubeSat (FSW).
Hardware
To select the best microcontroller, we have to take care about many things such as power consumption, temperature, operating voltage, I/O and serial bus compatibility to avoid some issues
Microcontrollers are available from different manufacturers in variants supporting 8-bit, 16-bit and 32-bit word length. 8-bit and 16-bit architectures were favoured in CubeSat technology because many of the embedded and real time applications at the time were not critically dependant on memory, power or speed and the amount of data to handle was sufficient.
With time, more products and applications started to require increased processing capability. It became clear that a migration from 8 and 16-bit to 32-bit core architecture was necessary, although the complexity remained an issue. This is why for the moment there is more CubeSat’s OBC developped with a microcontroller 16-bit.
Software
The software component controls the processor, its operation and control functionality. A real-time operating system (RTOS) is a multitasking operating system for real-time applications. RTOS such as: FreeRTOS (Advantage: free, open source, lightweight, reliable, compatible with MSP 430 microcontroller type). This is the OS used by the Liege University students for their CubeSat Oufti.
Architecture of the OBC
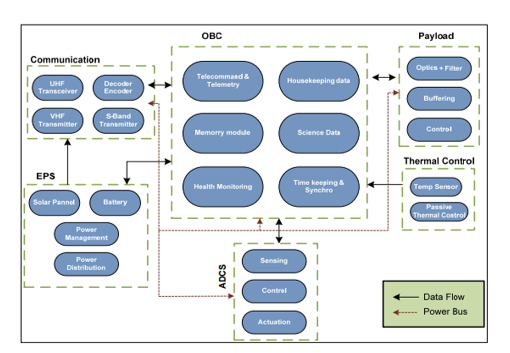
The OBC architecture is essentially based on the connectivity between subsystems within the CubeSat. This simply means that the microcontroller’s peripherals are configured according to the data flow within the CubeSat’s computing scheme.
Download the State Of the Art - OBC
Onboard computer of the cubsat
References
- Developpement d’un micro-ordinateur
- MSP430x1xx User’s guide
- EFM32GG880 DATASHEET
- Development of an onboard computer (OBC) for a CubeSat
Sizing OBC
Since the OBC is such as a computer, the components to size are everything about calculation power and memories. The ROM, the RAM, the OS, the microcontroller, but also the communication protocol have to be size.
Microcontroller
The microcontroller will run on 3.3 V to save power consumption and to fit with other CubeSats experiments.
Processor
The number of bit of the processor will have an impact on the power consumption and the efficiency for the calculation. A 8-bit processor will consume less while a 32-bit processor will have a better efficiency. Nevertheless, the new generation of 32-bit processor are low power consumption and could be used in CubeSat’s architecture.
RAM
The Random Access Memory (RAM) has to be able to keep working without damage its data under radiation and high temperature. We chose to implement the OBC and the ADCS on the same electronic card to save space. For this, the RAM must meet the OBC and ADCS modules needs. We consider all program data for the two modules will need no more than 4MB.
A static RAM, or SRAM, will be used on the board since it consume less power.
ROM
The ROM used will be both flash memory and EEPROM. The Flash memory to store programs and data and the EEPROM to hold the program that would be launched if the OBC has to shut down due to energy/malfunction issues.
Operating System
A big number of OS exists for embedded systems. But, for CubeSats, there is only two different OS mainly use. FreeRTOS and Salvo.
References
- OnBoard Computer for PicoSatellite
- Design and Development of an ADCS OBC for a CubeSat By Pieter Johannes Botma
Organization Chart OBC
There are three phases of algorithms:
The first algorithm is to control the detumbling phase following the separation from the launcher.
The second algorithm to charge battery.
The third algorithm for the mission mode with the paylaod deployment.
There are three loops, one for each algorithm. Each loop has a quick main with a watchdog protection and a stack for CubeSat states to avoid blocking calls.
Charts
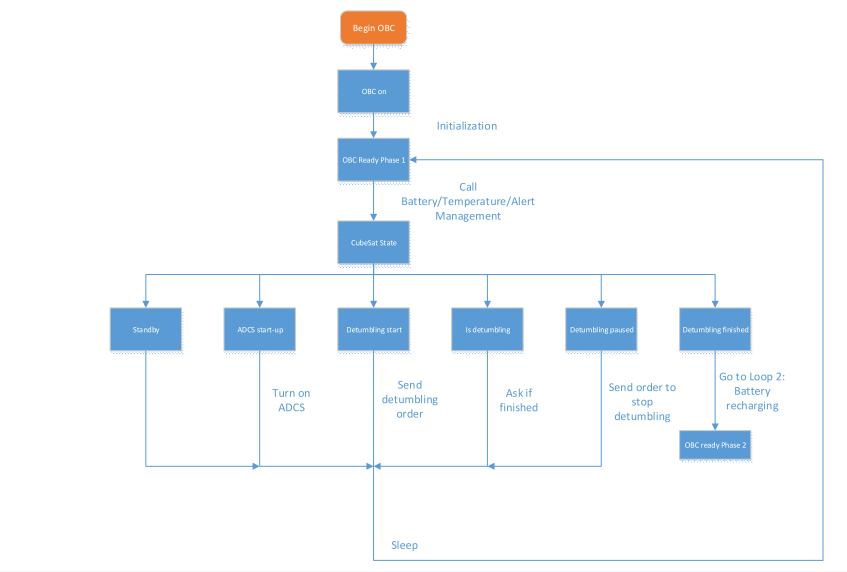
Loop 1: Detumbling
The detumbling phase following the separation from the launcher. After an initialization, the OBC turns on the ADCS, then send an order to stabilize the CubeSat. The OBC sends regulary an order to ask if the detumbling phase is finished. When it is finished, an order is sent to stop the detumbling and the next loop begins.
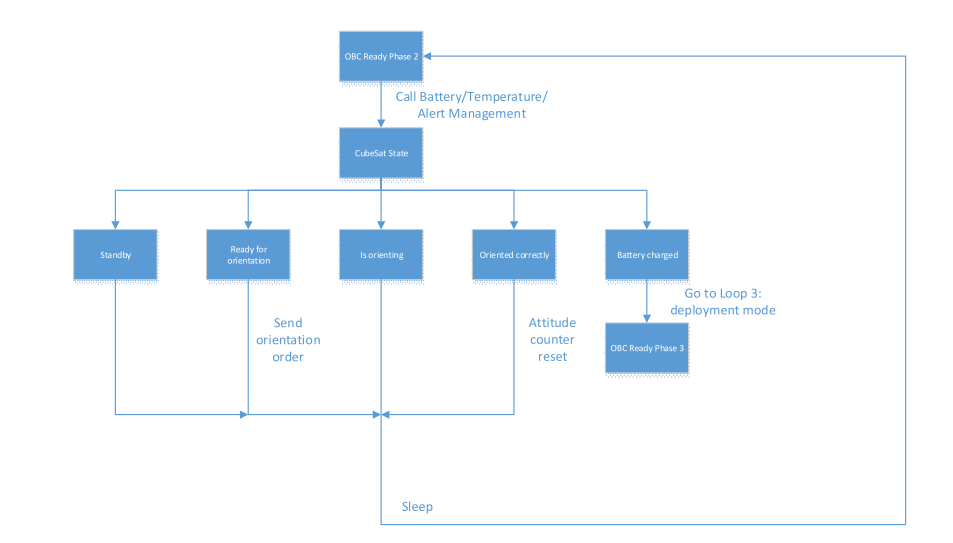
Loop 2: Charge battery
To charge the battery, the OBC controls if the CubeSat is oriented correctly. To do that, an orientation order is regulary sent until the CubeSat is oriented correctly.
This loop is executed when the CubeSat is under sunlight.